什么是 V4L2
Video for Linux 2 是 Linux 内核中关于视频设备的内核驱动框架,为上层访问底层设备提供了统一的接口。
一共支持 5 类设备,视频采集(输入)设备、视频输出设备、直接传输接口(Output Overlay)、视频间隔消隐信号接口(VBI)、收音机(radio)。
我们本文只讨论 Camera,也就是 视频采集设备。
Linux 中的 V4L2
1. 整体结构
本小节参考归纳自 廖老师的内容:http://blog.csdn.net/paul_liao/article/details/8915781
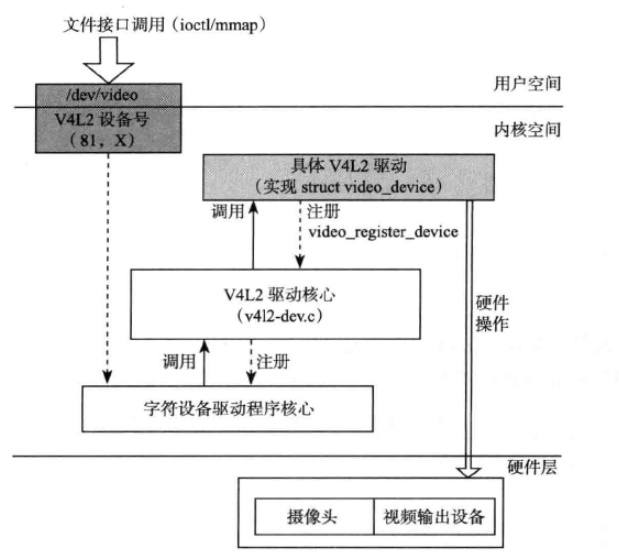
可以看到整个结构包括四个部分:
- 字符设备驱动核心: V4L2 本身为一个字符设备(Chrdev),具有字符设备的所有特性。
- V4L2 核心:用来构建一个内核中标准视频设备的框架,为视频操作提供统一接口。 drivers/media/v4l2-core
- 平台 V4L2 设备驱动:在 V4L2 框架下,根据平台自身特性实现与平台相关的 V4L2 驱动部分,包括注册 video_device 和 v4l2_dev。
- 具体 sensor 驱动:实现各种设备控制方法供上层调用,完成 上电、提供工作时钟、视频图像裁剪、流 IO 开启等功能。
重点在于上面第二部分 V4L2 核心 ,drivers/media/v4l2-core 中的代码按照功能又可以分为四类:
- 核心模块实现 v4l2-dev.c :申请 Chardev,注册 Class,提供 Video Device 注册 注销等函数。
- 框架 v4l2-device.c v4l2-subdev.c v4l2-fh.c v4l2-ctrls.c:构建 V4L2 框架。
- Videobuf 管理 videobuf2-core2.c videobuf2-dma-contig.c videobuf2-dma-sg.c videobuf2-memops.c videobuf2-vmalloc.c v4l2-mem2mem.c :完成 VideoBuffer 的分配、管理、注销
- IOCTL 框架,v4l2-ioctl.c :构建 V4L2 Ioctl 框架。
2. v4l2 框架部分代码分析
这部分的文件在 v4l2-device.c v4l2-subdev.c v4l2-fh.c v4l2-ctrls.c
v4l2-device.c 中,
v4l2_device 充当了父设备,通过链表将注册到其下的所有子设备(Grabber采集器、VBI、Radio)管理起来。
v4l2_subdev 是子设备,其包含了对设备操作的 ops 和 ctrls。
video_device 用于创建子设备节点,将操作设备的接口暴露给用户空间。
v4l2_fh 是每个子设备的句柄,在打开设备节点文件时设置,方便上层索引到 v4l2_ctrl_handler,后者用来管理设备,包括调节饱和度、对比度、白平衡等。
v4l2_device
1 | struct v4l2_device { |
v4l2_subdev
子设备 v4l2_subdev 中包含了其相关的属性和操作
1 | struct v4l2_subdev { |
每个子设备驱动都要实现一个 v4l2_subdev 结构体,它可以内嵌到其他结构体中,也可以独立使用。
video_device
用于在 /dev 目录下生成设备文件,把操作设备的接口暴露给用户空间。
1 | struct video_device |
v4l2_fh 和 v4l2_ctrl_handler
v4l2_fh 是用来 保存 subdev 特有的操作(v4l2_ctrl_handler),内核提供一组 v4l2_fh 的操作方法,一般在打开设备节点时进行注册。
1 | //初始化v4l2_fh,添加v4l2_ctrl_handler到v4l2_fh: |
v4l2_ctrl_handler 是用于保存子设备控制方法集的结构体。
对于视频设备这些ctrls包括设置亮度、饱和度、对比度和清晰度等。
用链表的方式来保存ctrls,可以通过v4l2_ctrl_new_std函数向链表添加ctrls。
1 | struct v4l2_ctrl *v4l2_ctrl_new_std(structv4l2_ctrl_handler *hdl, |
3. Ioctl 框架部分代码分析
以 Video Capture Interface 为例来分析从下到上其 ioctl 接口代码流程。
用户空间通过打开 /dev/ 目录下的设备节点,获取到文件的 file 结构体,
通过系统调用 ioctl 把 cmd 和 arg 传到内核。
通过一系列的调用,
最终调用到 __video_do_ioctl 函数,
然后通过 cmd 检索 v4l2_ioctls[],判断是 INFO_FL_STD 还是 INFO_FL_FUNC ,
如果是 INFO_FL_STD ,会直接调用到视频设备驱动中的 video_device->v4l2_ioctl_ops 函数集
如果是 INFO_FL_FUNC,会先调用到 V4L2 自己实现的标准回调函数,然后根据 arg 再调用到 video_device->v4l2_ioctl_ops 或 v4l2_fh->v4l2_ctl_handler 函数集。
3.0 IO 访问的三种方式
根据 IO 访问的方式不同,我们视频采集的方式自然也有三种
- read/write
- V4L2_MEMORY_MMAP
- V4L2_MEMORY_USERPTR
我们采用的是第二种 mmap 内存映射缓存区的方式。
当 Camera Sensor 捕捉到图像并通过并口 或者 MIPI 传输到 CAMIF ,CAMIF 可以对图像数据进行调整(裁剪、翻转、格式转换)。
之后 DMA 控制器设置 DMA 通道请求 AHB 将图像数据传到分配好的 DMA 缓冲区。
之后 mmap 操作将缓冲区映射到用户空间,应用就可以直接访问缓冲区的数据。
3.1 打开设备文件
两种方式:
1)非阻塞
1 | int cameraFd; |
这种模式下,即使没有捕获到视频信息,也要把缓存 DQBUFF 中的内容返回给上层应用。
2)阻塞
1 | cameraFd = open("/dev/video0". O_RDWR, 0); |
3.2 取得设备所提供的功能(Capability)
通过 IOCTL 获得设备提供的功能(Capability)即查询设备属性,包括:可读、可写、调制方式、支持 VBI。
capabilities 常用值:
V4L2_CAP_VIDEO_CAPTURE // 是否支持图像获取
1 | struct v4l2_capability capability; |
1 | struct v4l2_capability |
3.3 取得/设定视频所支持的制式
通过 IOCTL 取得或者设定 视频制式。就电视而言,我国是 PAL,欧洲国家为 NTSC。
获得:
1 | v4l2_std_id std; |
设置:
1 | struct v4l2_format fmt; |
3.4 向驱动申请帧缓存
通过 IOCTL 申请存储空间(帧缓存)来存放我们采集到的视频。一般不超过 5 个。
1 | struct v4l2_requestbuffers req; |
v4l2_requestbuffers 中会定义缓存的数量,驱动据此申请对应数量的视频缓存。
3.5 获取每个缓存的信息 并 映射到用户空间(mmap)
通过 IOCTL VIDIOC_QUERYBUF 获取帧缓存地址。
利用 mmap() 转换成上层的绝对地址,并将这个帧缓存放在缓存队列中,以便存放采集到的数据。
1 | typedef struct VideoBuffer { |
3.6 启动视频采集
存储空间 OK , 接下来应该开始捕获视频数据。
Linux OS 将系统使用的内存划分为 用户空间 和 内核空间。
应用程序可以直接访问 用户空间 的内存的地址,不可以访问 内核空间。
但是 V4L2 捕获的数据最初是存放在 内核空间的,所以应用程序需要通过某些手段转换地址,进而访问该段内存。
三种视频采集(IO访问)方式:
1)read、write
2)mmap 内存映射
3)userptr 用户指针:内存由应用程序分配,并把地址传递到内核中的驱动程序,由 V4L2 驱动程序直接将数据填充到用户空间的内存中。(v4l2_requestbuffers.memory 设置为 V4L2_MEMORY_USERPTR)。
userptr > mmap > read/write
调用 IOCTL 的 VIDIOC_STREAMON 命令来启动视频采集。
1 | int buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE; |
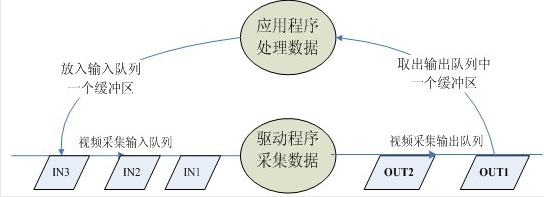
3.7 环形缓冲队列的处理
通过 IOCTL 的 VIDIOC_DQBUF 和 VIDIOC_QBUF:
取出 FIFO 缓存中已采样的帧缓存,将处理完的缓存放在缓存队列尾部,以便视频采集过程可以循环使用他们。
流程如下图:
代码如下:
1 | struct v4l2_buffer buf; |
3.8 停止视频采集
通过 IOCTL 停止视频采集:
1 | int ret = ioctl (fd, VIDIOC_STREAMOFF, &buf_type); |
3.9 关闭相应设备
1 | close(fd); |
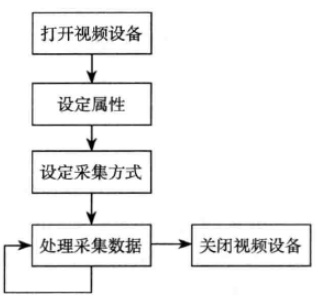
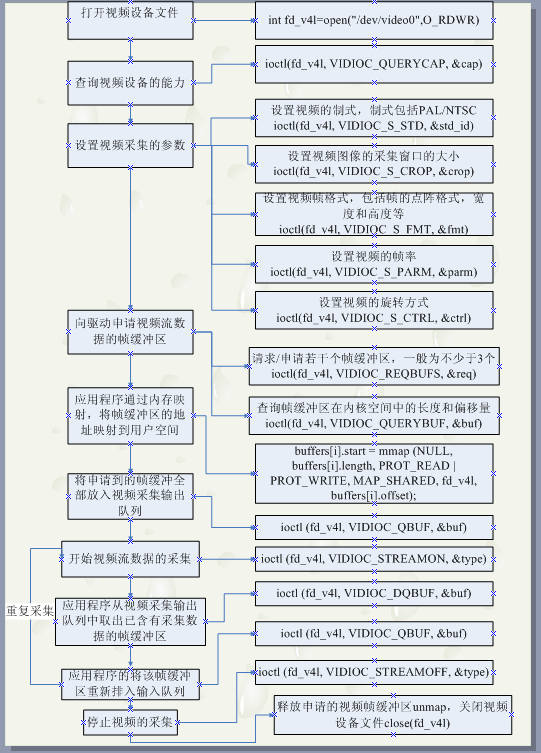
归纳其视频采集流程如下图:
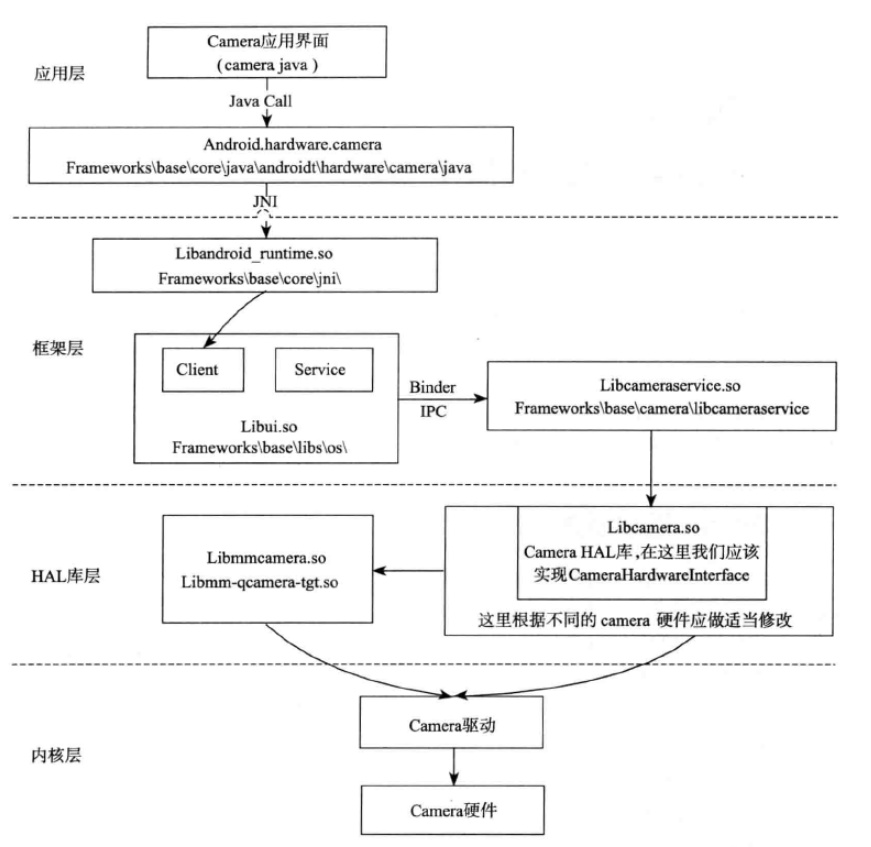
Android 上层调用 V4L2 接口
为了让 Android 上层利用到 Camera 驱动、利用 Camera 模组采集想要的视频图像数据,我们也应该 Android 的 Framework 实现相应的 HAL 与 Service 。 如图: